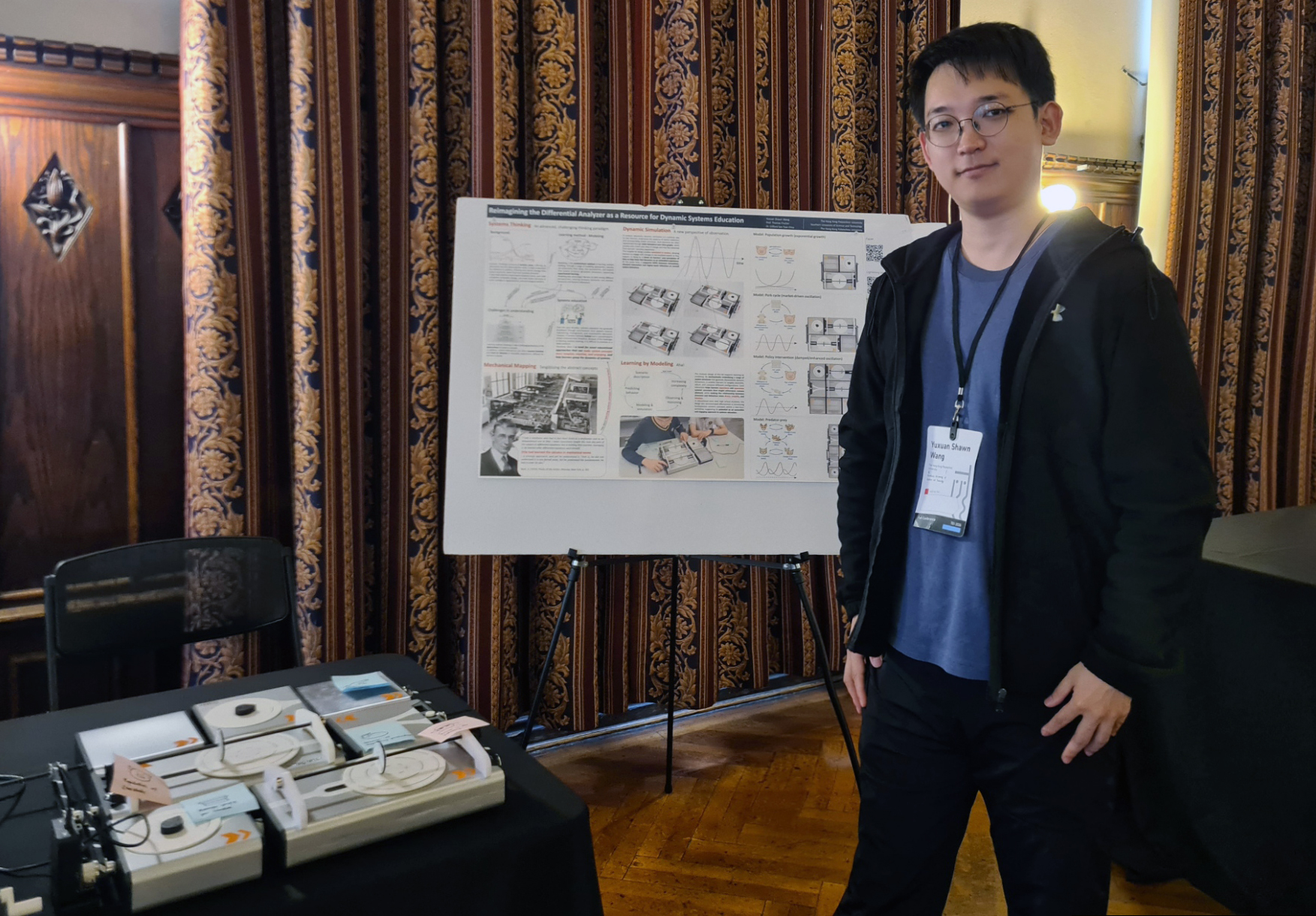
Can a mechanical computing device from the 1930s become a hands-on resource for systems thinking for today’s learners? This was the question Yuxuan Shawn Wang explored with his work-in-progress demonstration at the Twentieth International Conference on Tangible, Embedded, and Embodied Interaction (TEI ‘26), held in Chicago from March 8–11, 2026.
Yuxuan presented his work-in-progress paper, “Reimagining the Differential Analyzer as a Resource for Dynamic Systems Education”, co-authored with his supervisors Thomas Fischer and Clifford Sze-Tsan Choy, and published in the ACM TEI ‘26 proceedings. The paper describes a tangible learning kit designed to introduce novice learners to dynamic systems concepts without requiring a background in calculus or advanced mathematics.
The project takes inspiration from the MIT Differential Analyzer, a pioneering mechanical analog computer developed by Vannevar Bush around 1930. The original machine was built for scientific computation. Yuxuan’s kit reimagines its core mechanism, the disk-wheel integrator, as a pedagogical demonstration and learning tool. By physically assembling modular computing components and connecting them with timing belts, learners can model and simulate prototypical dynamic systems, directly observing the emergent behaviors described by systems theory.
The kit currently supports five simulation models arranged in a scaffolded learning sequence: integration, exponential growth and decay, oscillation, damped oscillation, and Lotka–Volterra predator–prey model. Each model is framed through relatable everyday scenarios — such as animal populations, market-driven cycles, financial leverage, and predator-prey competition — and can be reconfigured progressively to reveal how changes in system structure produce fundamentally different behaviors. Future models in development include the Lorenz attractor, which will introduce learners to chaos theory.
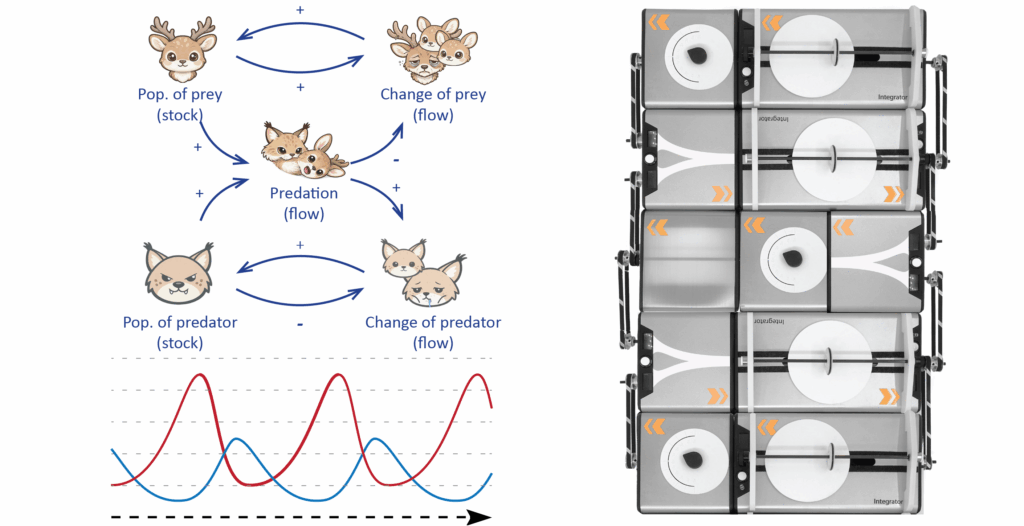
A predator-prey system modeled using the tangible learning kit currently under development at the Design Cybernetics Group
Central to the kit’s pedagogical design is the principle of selective exposure: Only the mechanisms most relevant to the learning objective are made visible, while others are deliberately concealed. Inter-module connections are easy to trace, allowing learners to see system structure and value propagation clearly. Mathematical formalism is withheld entirely during activities, keeping attention focused on the structural relationships of systems rather than on mathematical equations.
Each computing module is powered by rechargeable Li-ion batteries and enhanced with microcontrollers, brushless DC motors, and encoders, making the kit robust, low-maintenance, and responsive to hands-on interaction. Learners can manually change parameters, reconfigure models, turn shafts, probe fluctuations, and relate the dynamic simulation to behavior-over-time graphs displayed on a computer screen.
At TEI ‘26, Yuxuan demonstrated the kit in action, giving conference participants the opportunity to experience these dynamic system behaviors firsthand. Four rounds of pilot testing with learners have informed iterative improvements to both the hardware and the accompanying learning activities.
This research is situated between tangible interaction design, dynamic systems education, and the history of computing, and offers a promising model for making systems literacy more accessible at scale. An educational evaluation is currently ongoing. Results will be posted here in due course.
Reference

